Quadricoptère/Drone
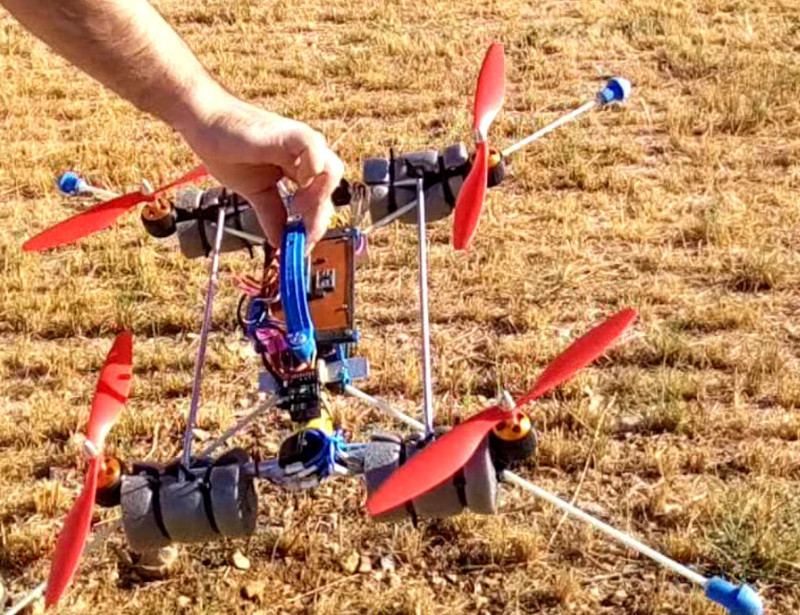
Basé sur une carte arduino nano avec un chassis en aluminium fait maison et une radio ProTronic,
le quad pèse 1.3kg, sachant que chaque moteur a une poussée de 0.7kg soit 2.8kg au total,
le quad reste bien maniable et réactif.
Le gyroscope permet de stabiliser le quad en lui envoyant les données en x,y,z(roll, pitch, yaw) en continu.
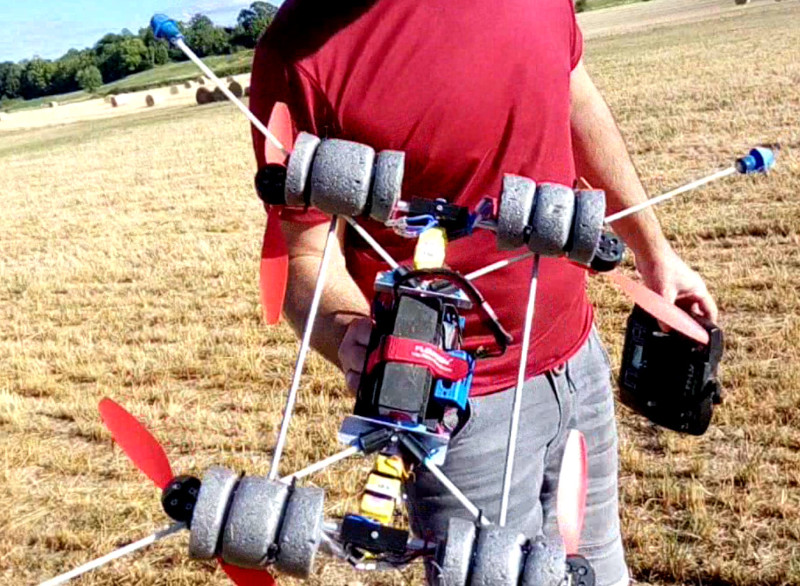
Le tout fonctionne avec l'application MultiWii (Open source), j'ai rajouté des bras de protection avec un embout bleu pour éviter de casser les hélices à chaque chute ! . Il y a aussi des pièces imprimées avec une imprimante 3D avec du filament PLA, mais j'ai eu des surprises au soleil, elles se déforment avec la chaleur !
Le gyroscope permet de stabiliser le quad en lui envoyant les données en x,y,z(roll, pitch, yaw) en continu.
Le tout fonctionne avec l'application MultiWii (Open source), j'ai rajouté des bras de protection avec un embout bleu pour éviter de casser les hélices à chaque chute ! . Il y a aussi des pièces imprimées avec une imprimante 3D avec du filament PLA, mais j'ai eu des surprises au soleil, elles se déforment avec la chaleur !

⚙️ Conception du Quadcoptère/Drone:
- Arduino Nano 328p
- 4 moteurs brushless de 1000kv
- Protronic Radio récepteur
- MPU6050 Gyroscope 3 axes
- Lipo batterie 3S
- 4 ESC 30A
- Barre d'alluminium
- Imprimante 3D
⚙️ Radio commande du Quadcoptère/Drone:
- Protronic Radio transmeteur
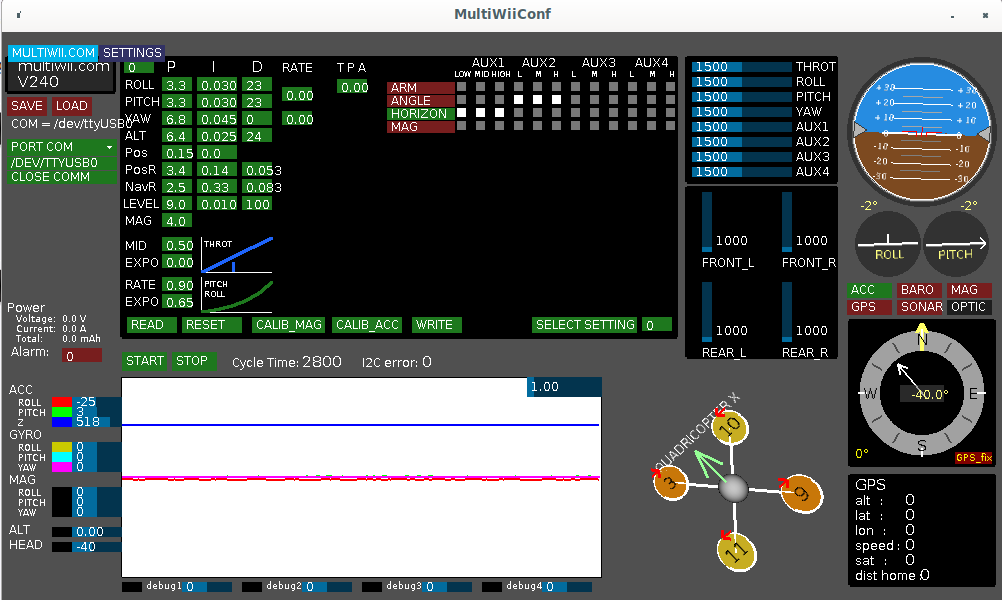
L'application MultiWiiConf(disponible pour Linux, Mac, Android et Windows)
permet de faire beaucoup de réglages pour stabiliser le quad. L'idéal,
est de se fabriquer un banc d'essai pour tester le quad avant le vol en plein air.
↩
